THE HUMAN ROBOT IS KNOCKING ON THE DOOR
THE HUMAN ROBOT IS KNOCKING ON THE DOOR
International research networks are working on robots that not only resemble humans in terms of their intellect, but also move and behave like humans. It will probably take a while before artificial intelligence can meet us on an equal footing.
By Johannes Zeller
The Human Brain Project (HBP) was launched in 2013 by the European Union - with an ambitious goal: Within the next ten years, they wanted to develop an artificial intelligence (AI) that achieves a computing power of one Exa-FLOPS. An Exa-FLOPS corresponds to a computing power of 10 to the power of 18 computing steps per second, i.e. a number that is larger than the number of stars in the Milky Way and the Andromeda Galaxy together (FLOPS: Floating Point Operations per Second; Exa: a trillion, i.e. one One followed by 18 zeros or 10 to the power of 18). From birth, every human being carries a compact version of such a computer – the brain. So the HBP wants to use AI to do within ten years what evolution took billions of years to do.
INCREASED EFFICIENCY THROUGH COOPERATION
At the beginning of this major project, in which more than a hundred research institutions and companies are involved, there was the establishment of an international research network. Neuroscientists, computer scientists and other specialists from different disciplines exchange ideas with each other today. Together they are studying the human brain in more detail than ever before - starting at the molecular level and ending with the connections that enable complex cognitive processes. Since this research also touches on ethical questions, philosophers are also on board.
In order for such a cooperation to function smoothly, the exchange within the knowledge community must improve. To date, there are no international standards for neurological research and the results are structured differently from organization to organization. This makes it difficult to capture the current state of research in a uniform model. The HBP aims to change that: researchers from all over the world should be able to access the new knowledge that is generated during the project and use it for their own projects. To this end, the project wants to set up an international platform that will uniformly process neuroscientific data for everyone. The findings can then also be used for medical research, for example.
AN AI TO SHAKE HANDS WITH
While the HBP in Geneva is investigating the structure of the brain, researchers in Munich are working on a robot that is intended to imitate the human body in all its sophistication. This robot, named Roboy, is sort of the face, arms and legs, ankle, swing of the hips and the look of the eyes of the HBP.
The story of Roboy began in 2013 at the University of Zurich, where computer scientists, engineers and mechatronics teamed up to develop a robot that - from a technical point of view - is in no way inferior to humans. The researchers came together from all over Europe and even involved partners from other continents: For example, with their knowledge of muscle control, researchers from the University of Melbourne made a decisive contribution to the software that controls Roboy's motor skills. In return, the Roboy team equips them with quality hardware for their own projects.
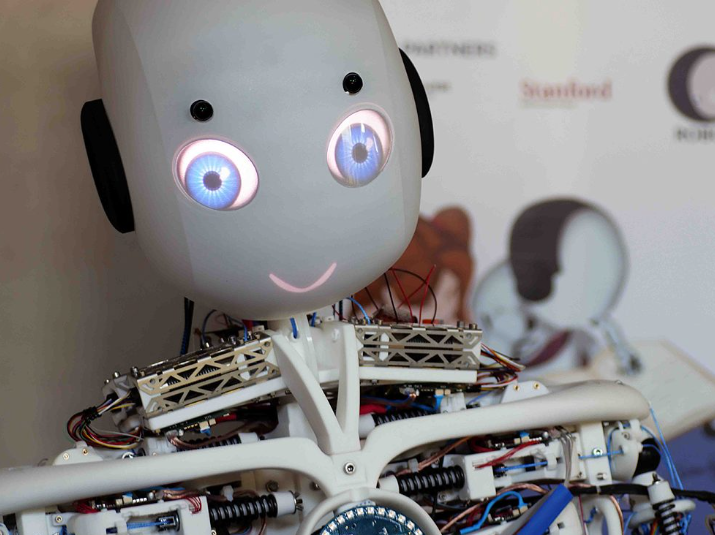
The robot has now moved to the Technical University of Munich. Every semester, a new team of students from different disciplines work there to teach Roboy something new. They guide him, for example, to have a conversation with two people at the same time or to play the xylophone. They make all the knowledge they have gained freely available on a robotics platform on the Internet. From the mechanics of his feet to the circuit diagram that lets Roboy's eyes see: The complete anatomy of the robot is explained in the open source portal and is available for download, so that any layperson, researcher or tech geek can access and develop the technical knowledge.
And the little robot is learning fast: Roboy can already ride a bike and operate a record player. A career as a waiter and carpenter awaits him in the future – jobs that require exceptional motor versatility.
MORE LIKE HUMANS THAN ANY MACHINE BEFORE
And 2023? By then, the HBP wants to achieve its goal and have developed a computer that is in no way inferior to the human brain. Until then, there are still a few hurdles to overcome. For example, many a technical step is still necessary for the computing power of an Exa-FLOPS. Huge amounts of energy are required to even begin to simulate the speed and storage capacity of the human brain. This requires development work in the area of energy-efficient computing power, which could ultimately also revolutionize traditional industry.
Should these hurdles be overcome, however, the future of the Roboy is impressive: fused with the HBP's exa-FLOPS "brain" it would resemble a human in its abilities like no machine before it. This of course raises fundamental ethical questions: An ethics committee has therefore always been a close companion of the project. On the other hand, his charming look and the robot's motto: "Be friendly" ensure that an encounter with Roboy is not perceived as threatening.
Humanoid Robot
A humanoid robot is a highly developed mechanical being, more precisely a robot whose construction is based on the human form . The positions of the joints and the movement sequences of a humanoid robot are often inspired by the human joint positions and movement sequences. Among other things, a humanoid robot mostly walks on two legs. A form of humanoid robot that is particularly similar to humans in terms of appearance and behavior is the android .
The term "humanoid" can basically be applied to anything that resembles a human but is not. As long as a head, a torso, two arms and two legs, and an upright walk are included in the scope, the term humanoid is appropriate.
History
The idea of building an artificial human is old. Greek mythology reports that the blacksmith god Hephaestus et al. built human-like machines. In 1495, Leonardo da Vinci sketched a simple automaton that looked like a soldier in armor. In 1738 Jacques de Vaucanson built a mechanical flute player. Until then, such mechanical, human-like machines were called automatons.
The term robot was coined by Karel Čapek , a Czech writer, in his 1921 play RUR (Rossum's Universal Robots), which is about artificial humans. The term robot is derived from the Slavic word rabota , which means work. In 1927, in his film Metropolis , Fritz Lang created a human machine with a female appearance, who was given the shape of a deceptively human-like android in the course of the film.
A prototype realization, the humanoid robot Elektro , was presented by the Westinghouse company at the 1939 World's Fair in New York.
In 1962, Claus Scholz from Vienna designed a humanoid robot, the MM 7, which was already able to implement very complex movement sequences (opening doors, sweeping the floor or pouring drinks from a bottle into a glass). However, it did not work completely autonomously, but was dependent on an external unit, to which it was connected by cable, for both power supply and control commands. The MM 7 has been preserved and housed in the Technical Museum in Vienna . One of the biggest problems Scholz had to deal with was locomotion, which the MM 7 and its successor model, the MM 9, could not solve satisfactorily. Finding a promising approach here was reserved for the next generation of researchers.
In 1970 Miomir Vukobratović proposed the zero moment point principle. With the help of this principle, the conditions for statically stable running could be met. In 1973, Waseda University built the Wabot-1 and began a long-running research program. In 1980 the MIT Leglab was founded. In 1984 the Wabot-2 played an electric organ. Since 1986, Honda worked on the E series, which later became the P series and ASIMO . At the same time, passive dynamic runners have become active since around 1990developed that used a newer approach to walking. Since around 2004, robots have been running, walking and running faster and more flexibly.
Research and Development
The development of humanoid robots is based on two main motives:
Artificial intelligence
Today, many scientists assume that the construction of a functional humanoid robot is the basis for the creation of a human-like, artificial intelligence (AI). According to this view, AI cannot simply be programmed, but results from a learning process. So a self-learning algorithm would have to be implemented in the device. This point of view is based on observations from learning psychology. The robot with AI should actively participate in human social life and learn through observation , interaction and communication. The basis of communication is an underlying motivation on both sides, which at least initially resembles that in the parent-child relationship. The AI of the robot can only develop optimally if it is already recognized as an equal being in its minimum range of functions. To do this, he must have a human form, mobility and sensors . The current goal is therefore a high-quality technical copy of human physiology. This special technological challenge means that there are separate research groups for complex sub-aspects that work together. Examples include the Leg Laboratory at the Massachusetts Institute of Technology , the humanoid robot project COG, and the AI project Kismet.
Multifunctional working machine
Cost-intensive commercial or state-funded humanoid robot projects demonstrate high expectations of the future profitability of such systems. The human living space (buildings, means of transport, tools or equipment) is economically oriented for cost reasons and is based particularly on human physiology.
A mass-produced number of multifunctional humanoid robots capable of learning renders the production, distribution and maintenance of many special robots unnecessary. In particular, activities that consist of several complicated work steps can be carried out easily. People should have a multifunctional helper at their side that saves them work or time in their environment or provides entertainment. Like Germany, Japan has a rapidly aging population. It is hoped that the consistent use of these all-rounders will support seniors in their everyday lives or relieve nursing staff. In order to increase the acceptance of robots in society, the Socially Intelligent Machines Lab of the Georgia Institute of Technology is researching the social skills of humanoid robots.
Current state of development
So far, hardly any development has reached market maturity, it is more about studies and marketing tools. Current skills include:
walking, running, hopping on one leg, dancing, walking around moving obstacles, climbing stairs , running in rough terrain, opening doors, balancing violent impacts from outside, getting up again after falling down
Push tray trolley, receive tray, transport, hand over, serve
sign language
playing the trumpet, playing the violin, playing music in a band
Riding a bike , catching and throwing a ball
Pouring drinks, loading and unloading the dishwasher, household chores such as B. Cooking, wiping windows and sweeping the floor, carrying loads, picking up boxes and putting them away
Commercial projects of humanoid robots
ASIMO ( Honda ) – in rental 2000–2022
Atlas by Boston Dynamics
HOAP -1 and -2 ( Fujitsu ) - a humanoid robot series, which is also commercially distributed for research purposes
Toyota Robot ( Toyota ) – entertainment robots
Qrio ( Sony ) - Further development discontinued in March 2006
Wakamaru ( Mitsubishi ) – on sale
Ri-man , Japan
REEM AC by Pal Technology
Pepper on sale 2015-2021
PETMAN by Boston Dynamics Prototype humanoid robot used in US military protective suit testing
Nao , toy robot by Aldebaran Robotics
Alpha 1S by UBTECH
Tesla Bot (Optimus) Tesla Bot Project by Tesla
Projects of humanoid robots in AI research
Cronos, Laboratory for Artificial Intelligence University of Zurich as part of the ECCE-Robot project of the EU
RobotCub , Italian/British university consortium
COG, Kismet , Massachusetts Institute of Technology
ERATO Synergistic Robotics, Osaka University
HUBO Labs at KAIST in South Korea build and research life-size humanoid robots
In Germany, the following – mostly university – institutions conduct research with humanoid robots:
Rheinische Friedrich-Wilhelms-Universität Bonn ( NimbRo )
Free University of Berlin ( FUmanoids )
Beuth Hochschule für Technik Berlin ( research laboratory neurorobotics , robot muon )
Technical University of Berlin ( DAI Laboratory )
Technical University of Darmstadt ( Darmstadt Dribblers )
University of Bremen ( B-Human )
HTWK Leipzig (HTWK Robots)
Technical University of Dortmund ( DoH!Bots )
University of the Federal Armed Forces Munich ( HERMES )
Karlsruhe Institute of Technology ( ARMAR III )
Technical University of Munich ( Johnnie , Lola )
Institute for Robotics and Mechatronics of the German Aerospace Center ( Rollin' Justin, TORO)
Courses
The Beuth University of Applied Sciences Berlin offers what is currently the only degree program in humanoid robotics in Germany. [25] [26] In addition, the topic can be deepened in higher-level courses such as robotics , automation and control engineering of various institutions. In an international context, for example, Imperial College London offers a corresponding master's degree.
Human skin for machines: Researchers in Japan want to invent the first humanoid robots
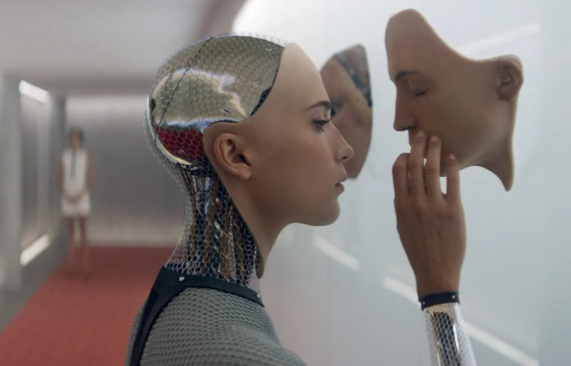
Living skin cells form the basis for precisely fitting and flexible covers. Robots could soon become even more humanoid.
Artificial skins covered with sensors already gave robots rudimentary senses of heat or touch. The thin cases are usually made of silicone-based plastics. Japanese material researchers have now gone one step further and grown skin from living cells. In the journal Matter, they describe how they were able to equip a robotic finger with this water-repellent and self-healing skin. The scientists see possible applications in human-like, humanoid robots that, thanks to the bionic skin, are better able to imitate human facial expressions than plastic shells.
"This work is a first step towards robots that can be completely covered with a living skin," enthuses Shoji Takeuchi from the University of Tokyo. The basis of the robot skin is a process with which flat pieces of skin could already be grown in the laboratory. However, these could not be transferred flush to a robot finger. Therefore, Takeuchi and colleagues used a small rubber hose, which they slipped over a three-part robotic finger. In this tube they filled a nutrient solution with the structural protein collagen and living fibroblasts - the most important skin cells in the connective tissue.
Two breeding weeks for a robotic finger
After a few days, a closed skin formed that clung tightly to the robot finger. In a second step, they added another cell type, the keratinocytes. At more than 90 percent, these skin cells are the most common cell type in the human epidermis and produce the stabilizing horny substance keratin. After two more weeks of breeding, the robot finger could be completely covered by a stable and water-repellent skin. This withstood dozens of bending movements. If cracks appeared, they could be closed again with a special plaster.
However, this robot skin did not last more than a few days. When the skin dried out, it lost its flexibility particularly quickly and tire when you moved your fingers. Takeuchi's team wants to solve this problem in further experiments, for example with filigree channels to prevent the robot skin from drying out. In addition, tried and tested sensors for tactile sensations and temperature could be added in the future.